



中山大学周博宇博士受邀参加光明实验室学术交流活动,助推实验室科研创新
![]() 发布时间:2023-11-23
发布时间:2023-11-23![]() 作者:光明实验室
作者:光明实验室![]() 浏览:5892次
浏览:5892次

中山大学人工智能学院助理教授周博宇到访光明实验室进行交流指导工作。
2023年11月15日,中山大学人工智能学院助理教授周博宇到访光明实验室进行交流指导工作,并进行了主题为“移动机器人复杂场景主动感知与交互”的学术讲座。
周博宇博士在本次讲座上分享了他们组内的工作,聚焦于无人机在未知空间探索中的定位、规划以及探索策略问题,细致地介绍了许多组内的出色工作,为实验室的科研人员带来了启发性的思路和方法。
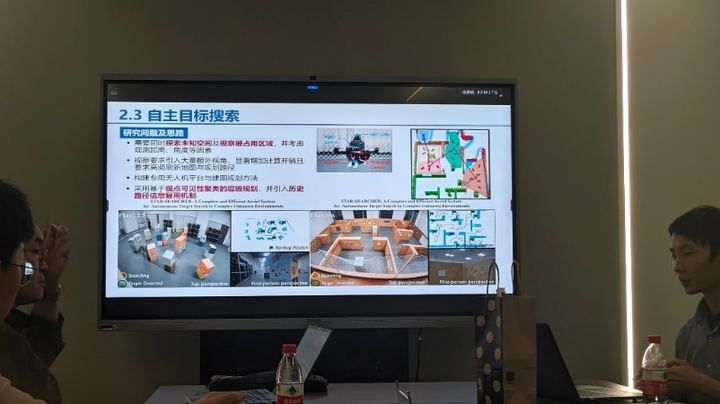
周博士表示,在定位方面,基于视觉的无人机定位面临着许多挑战。随着探索的进行,累积误差不断增加从而影响定位和建图精度。同时,由于环境中缺乏局部特征点,视觉定位也面临着挑战。因此,在无人机的探索规划中考虑视觉定位的因素,为探索的质量以及稳定性的问题提供了一个解决思路;在规划方面,无人机规划器的效率,以及规划的路径曲线,成为了探索的一大障碍。因此,规划器的轻量化和更加符合动力学的规划路径,能够有效地提升探索的连续性与速度;在探索策略方面,针对建筑的三维重建问题,未知的建筑结构与表面,严重影响无人机探索覆盖效率。采用基于学习的方式对建筑结构进行预测,然后采用全局规划加局部更新规划的方式,可以极大缓解重复规划问题,提升探索效率。
此次交流活动为光明实验室的科研工作提供了宝贵的指导和支持。光明实验室期待未来能与各大高校、科研机构的优秀科研人员有更多的交流、合作机会,携手共进,共同推进大湾区的科技创新与发展。
附:周博宇博士简介

周博宇,中山大学人工智能学院助理教授,STAR课题组(SmarT Autonomous Robotics Group)负责人,本科毕业于上海交通大学,博士毕业于香港科技大学电子与计算机工程系。曾获香港科技大学卓越学术奖,上海市优秀毕业生等荣誉。主要从事无人机、移动机器人自主导航、规划、自主探索与重建相关研究。近年来在TRO、RAL、ICRA、IROS等机器人邻域顶级期刊和会议发表论文二十余篇,其中第一/通讯作者12篇。多个工作被列为TRO、RAL 最受欢迎论文(最高排名第一),以第一作者完成的无人机运动规划、自主探索开源项目 Fast-Planner,FUEL 等在Github 累计获得 star 超过 2500 次。
END
供 稿 丨 庄礼聪
供 图 丨 钟小容
编 辑 丨 李沛昱



 发布时间:2023-11-23
发布时间:2023-11-23 作者:光明实验室
作者:光明实验室 浏览:5892次
浏览:5892次