



空间智能 + 国产算力 光明实验室为无人机装上 "城市大脑"
![]() 发布时间:2025-03-28
发布时间:2025-03-28![]() 作者:光明实验室
作者:光明实验室![]() 浏览:4338次
浏览:4338次

光明实验室解析新一代自主导航技术如何赋能无人机应对大尺度开放场景挑战!
空间智能与国产算力技术融合
随着低空经济加速崛起,无人机在物流、巡检、测绘等开放城市级场景的应用需求激增,也对无人机自主导航系统提出了更高要求。光明实验室聚焦 “空间智能” 与 “国产算力” 两大核心,以国产昇腾算力为技术底座,结合实景三维建模,多模态大模型,与底层安全控制技术,解析新一代自主导航技术如何赋能无人机应对大尺度开放场景挑战。
首创!"实景 + 自然语言生成" 空间建模技术
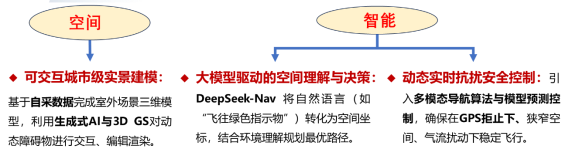
针对城市空间三维结构复杂、动态场景要素多变等难题,研究团队首创"实景 + 自然语言生成" 的空间建模技术。该技术通过多源传感器数据采集构建高精度实景三维模型,并结合自然语言技术实时补充动态场景要素,实现了城市级大场景的可交互式建模。例如行人、环形障碍物,暴雨等极端天气条件下,系统可利用简单的对话形式生成虚拟环境,确保导航系统的持续稳定运行。
"大小脑协同" 智能架构
在导航决策层面,实验室借鉴生物神经机制提出 "大小脑协同" 智能架构。其中 "大脑" 系统基于昇腾国产算力平台,通过 DeepSeek-Nav 大模型构建环境认知图谱,完成空间认知与目标点决策;"小脑" 系统则聚焦实时控制,利用模型预测与扰动观测技术实现厘米级轨迹跟踪与动态避障。这种分层架构使无人机在深圳光明区玉塘街道的实测中,成功实现了复杂城市环境下的自主飞行。
为验证技术可行性,在国产化Rflysim的仿真环境中,实验室构建了空间智能驱动的无人机仿真系统。通过将光明区玉塘街道的真实三维场景导入 Rflysim,结合动态抗扰控制算法,系统不仅实现了无人机在密集建筑群中的自主飞行,更创新地支持自然语言交互指令。测试显示,用户通过文本下达 "飞向绿色球体" 等指令时,无人机能够精准识别空间元素并完成任务,标志着人机交互进入空间智能新阶段。
空间智能技术体系化布局
随着国产算力硬件性能的提升与 DeepSeek-Nav 机制的持续优化,在未来,光明实验室期待以空间智能为核心,持续推动无人机自主导航技术的突破,通过数据采集->传输计算->智能决策->应用开发的链条紧密联系,形成一个动态优化的通感一体闭环系统,助力低空经济发展。
该工作得到了李清泉院士、于非院士、王智均教授的指导和支持,团队成员包括刘洲,尹鹏帅,李明,许博文等几位老师,以及学生张晓艺,柳少亭,李永杰。
该工作也充分发挥了光明实验室在空间智能领域的数据积累与技术交叉融合优势。在空间建模中首次实现实景数据导入,并跨团队融合多模态数据解译、DeepSeek-Nav大模型等关键技术,实现技术路线闭环。
空间智能作为AI技术栈的“关键拼图”和产业变革的“新引擎”,将持续积累获取物理世界的多模态数据,为AI提供真实世界的结构化数据底座,推动AI从“数据驱动”迈向“物理交互驱动”,为交互智能和具身智能提供底层能力支撑。
光明实验室将着力打造具备自身特色优势的空间智能创新体系,依托李清泉院士、于非院士等领衔的科学家团队在空间智能领域的多学科技术积累与数据资产优势,构建“全域泛在感知-多模态数据解译-多模态大模型-多场景应用”的闭环架构,以应用为牵引,开展关键技术攻关,重构物理与数字世界的交互范式,赋能智慧城市、低空经济、无人驾驶、具身智能机器人等战略新兴产业变革,最终基于算力基座优势,逐步推动空间智能领域全栈国产化。
END
素 材 丨 智能飞行与安全控制团队
自主机器智能团队
编 辑 丨 李沛昱
审 核 丨 刘 洲 李沛昱 郭 锴



 发布时间:2025-03-28
发布时间:2025-03-28 作者:光明实验室
作者:光明实验室 浏览:4338次
浏览:4338次


