



DeepSeek-Nav 首次实现柔性障碍穿越与陆空无缝切换,国产算力赋能无人飞车智能导航
![]() 发布时间:2025-03-24
发布时间:2025-03-24![]() 作者:光明实验室
作者:光明实验室![]() 浏览:3675次
浏览:3675次

光明实验室在空地一体具身智能导航领域取得突破性进展! 研究团队依托国产异腾算力平台,创新性融合自主研发的 DeepSeek-Nav 导航系统与模型预测控制 "大小脑" 技术,率先突破柔性障碍物识别与环境自适应陆空模态决策两大技术瓶颈,其研发的空地一体导航解决方案在自研飞行汽车教育平台 "太极" 上完成全场景实机验证,为未来飞行汽车在城市复杂环境中的自主导航提供了范式级技术支撑。
此次技术突破通过两大创新体系重构了智能导航的技术边界:
柔性障碍物识别:开创环境交互新维度
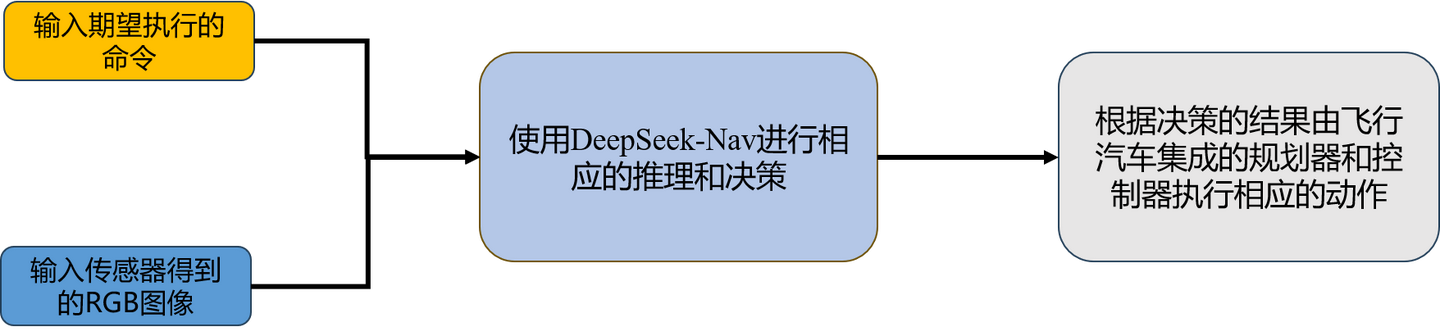
针对传统导航系统将轻薄材质障碍物(如窗帘、横幅)误判为刚性障碍的行业痛点,DeepSeek-Nav 系统构建了 "感知 - 理解 - 决策" 的全链条智能处理框架。通过多模态传感器实时采集环境数据,结合大模型的语义理解能力,系统能够精准判别障碍物属性,动态生成最优通行策略。在实验场景中,搭载该系统的飞行汽车可在 3 秒内完成障碍类型识别,并以陆地模式直接穿越柔性障碍,较传统绕行方案提升通行效率达 50%。
陆空模态决策:构建空地协同新范式
基于 DeepSeek-Nav 与模型预测控制的 "大小脑" 架构,系统实现了环境感知与决策控制的深度耦合,在保障大脑空间语义理解精度的同时,控制小脑响应的实时性为毫秒级。具体而言,当面临陆空切换的导航任务时, 首先通过DeepSeek-Nav的环境理解和推理能力,自主判断是否需要启动飞行模态,并同步完成目标位置的空间定位(左 / 右判别准确率达 90%)。在此基础上,系统调用局部运动规划器生成平滑轨迹,并通过抗干扰控制器动态补偿空气动力学扰动,最终实现地面行驶与空中飞行模态的无缝切换。这一创新机制不仅提高了飞车对空间的理解能力,同时保障实时性,更通过空地协同决策,为复杂城市环境中的立体导航提供了技术范本。
开启国产算力AI新篇章
此次研究成果不仅展现了国产算力在AI自主导航领域的强大潜力,也进一步推动了飞行汽车在科研教育中的创新应用,为未来智慧交通、无人系统、自主机器人等领域带来全新机遇!
该工作得到了李清泉院士和于非院士的指导和支持,团队成员包括尹鹏帅老师,刘洲老师, 博士生李永杰、硕士生柳少亭、工程师刘子旋和工程师尤联忠。
END
素 材 丨 智能飞行与安全控制团队
自主机器智能团队
编 辑 丨 李沛昱
审 核 丨 刘 洲 李沛昱 郭 锴



 发布时间:2025-03-24
发布时间:2025-03-24 作者:光明实验室
作者:光明实验室 浏览:3675次
浏览:3675次