智慧城市团队的研究成果《A Novel Method of Urban Landscape Perception Based on Biological Vision Process》(一种基于生物视觉过程的城市景观感知新方法)被国际顶级期刊《Landscape and Urban Planning》接收。论文第一作者为智慧城市团队博士后曹越皓,通讯作者为副研究员李游。
《Landscape and Urban Planning》是Elsevier旗下专注于景观和城市规划领域的学术期刊,旨在促进对景观的概念性、科学性和应用性理解,为应对景观变化提供可持续解决方案。该期刊是中科院1区TOP期刊,五年平均影响因子8.7。
城市景观感知,是智慧城市建设中的难点,对于理解人与建成环境的互动至关重要。本研究将景观感知与生物视觉过程相结合,提出了一个新的理论框架,弥补了现有研究在理解景观感知机制、过程和内容方面的不足。研究构建了由色彩特征、景观要素、空间形态和景观意象4个维度30项指标构成的景观感知测度体系。此外,研究使用视觉大模型,进行色彩分析、语义分割、目标检测和深度估计,实现城市景观客观感知的精准提取,并使用随机森林建立客观感知与主观感知之间的非线性关系。在重庆开展的实证研究表明,色彩特征、空间形态与景观要素相似,与景观感知具有显著的相关性。此外,消融实验表明,与现有方法相比,基于生物视觉过程的感知测度方法在准确性和拟合度方面均有所提升。本研究阐明了影响景观感知的关键因素,优化了感知的测度方法,为现实复杂情境下的城市智能感知提供了理论与技术支持,推动了人工智能在智慧城市垂直领域中的应用。
城市景观感知,是促进建成环境人本化提升的重要抓手和关键路径,对改善居民空间体验、增强市民认同感、提升群众获得感至关重要。尽管城市景观感知的研究相较于传统城市研究方法,在时空大数据、人工智能算法应用等方面,展现出了明显的智能化趋势,但在城市景观感知机制以及测度方法上仍然存在一定的局限。具体而言,目前研究通常只讨论建成环境中的景观要素构成,而忽略了生物视觉过程以及该过程中所产生的感知信息。因此,亟需一个融合城市景观以及生物视觉的多学科、系统性理论框架,阐述城市景观感知的机制,细化感知过程与感知内容,以弥补景观感知研究在广度与精度上的缺陷。
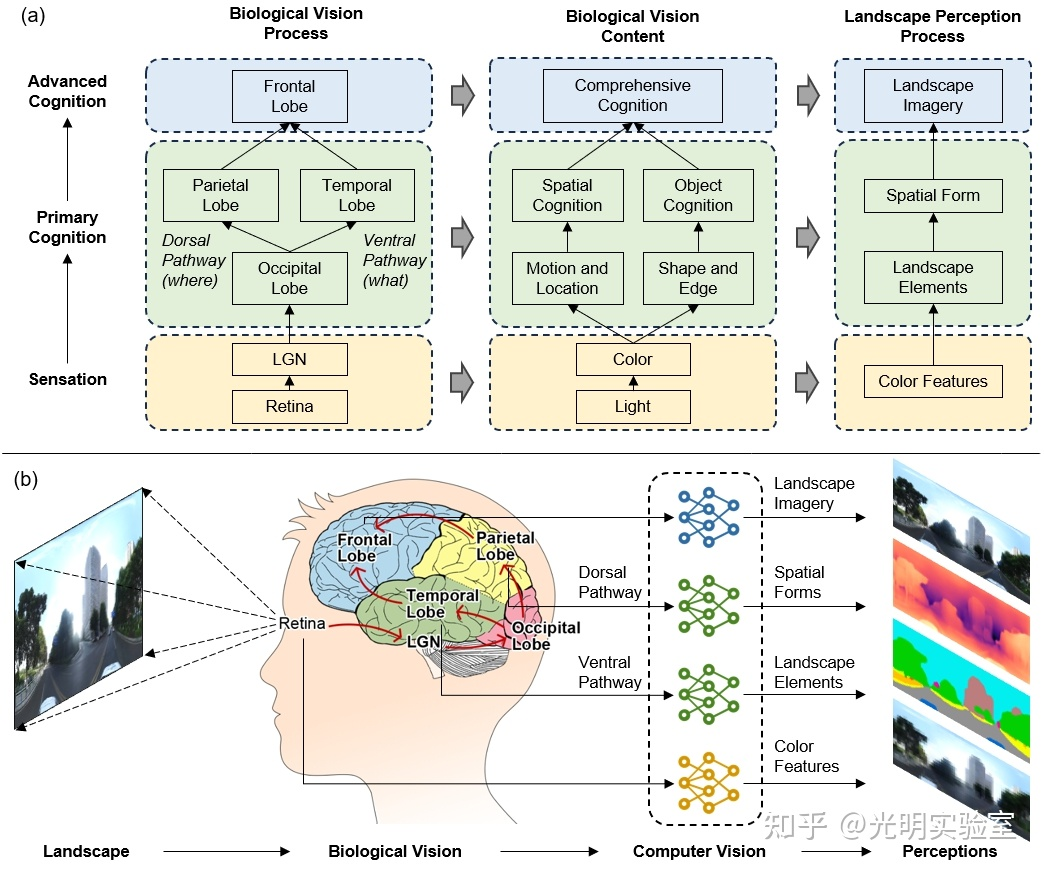
基于此,本研究将生物视觉过程映射至城市景观感知过程,提出跨学科的城市景观感知理论框架,景观感知的过程可以概括为感觉、初级认知和高级认知,并依次产生感知内容,包括色彩特征、景观要素、空间形态和景观意象。据此,研究建立了多层级、可量化、主客观结合的城市景观感知指标体系,包括4个维度,共计30个指标。
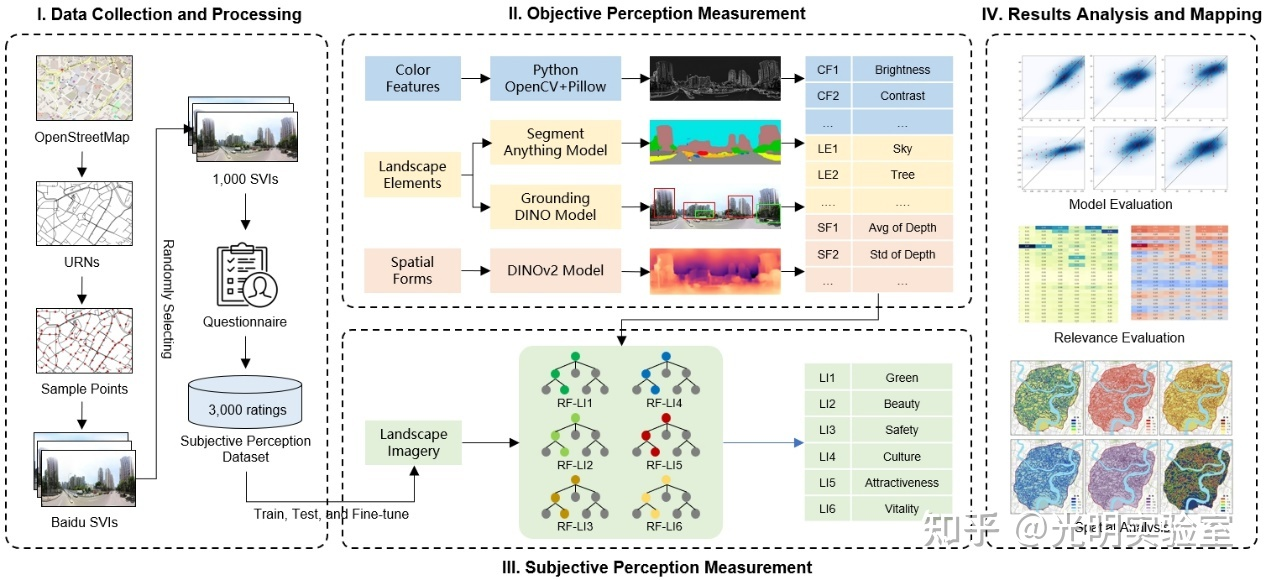
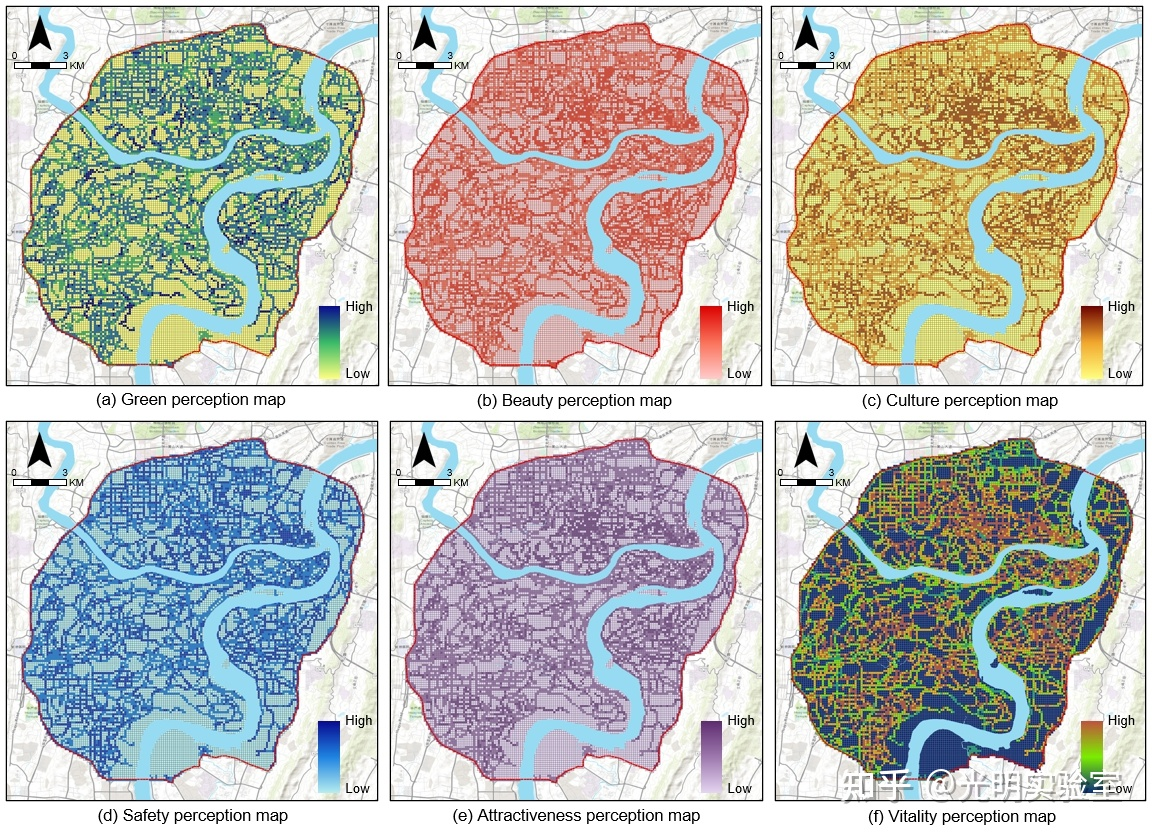
实证研究分为数据收集、客观感知测度、主观感知测度、方法对比。其中,数据收集,通过OpenStreetMap、百度地图API和在线问卷调查收集矢量路网、街景照片和主观感知评价等数据;客观感知测度,使用SAM、Ground DINO、DINOv2视觉大模型,实现对城市景观的色彩特征、景观要素、空间形态3个维度共计24个指标进行的精确计算;主观感知测度,使用随机森林算法,建立客观感知与主观感知之间的非线性关系,实现对景观意象的绿色感知、美学感知、文化感知、安全感知、吸引感知和活力感知6个指标的精准预测;方法对比,消融实验表明,相较于已有研究的方法,本研究方法对6项主观感知的预测精度方面都有显著的优势,证明了空间形态和色彩特征对于景观感知具有重要的影响和作用。
✦ (1)融合城市景观研究与生物视觉过程,提出一个新的城市景观感知理论框架,弥补现有研究关于景观感知机制、过程和内容上的不足;
✦ (2) 利用视觉大模型进行色彩分析、语义分割、目标检测与深度估计,提高了景观感知测度的精度与效率;
✦ (3) 通过实证研究与消融实验,验证了本文方法在准确性与适配性方面优于现有方法,并确定了影响城市景观感知的关键因素。








 发布时间:2024-10-29
发布时间:2024-10-29 作者:光明实验室
作者:光明实验室 浏览:5480次
浏览:5480次