



科研动态 | 光明实验室智慧城市团队最新研究成果: 基于2D-3D几何约束的高效点云室内空间分割方法
![]() 发布时间:2024-12-29
发布时间:2024-12-29![]() 作者:光明实验室
作者:光明实验室![]() 浏览:4364次
浏览:4364次

智慧城市团队的最新研究成果《Back to Geometry: Efficient Indoor Space Segmentation from Point Clouds by 2D-3D Geometry Constrains》在国际顶级期刊《International Journal of Applied Earth Observation and Geoinformation》发表。论文通讯作者为智慧城市团队副研究员李游。
《International Journal of Applied Earth Observation and Geoinformation》是Elsevier旗下专注于地球观测与地理信息科学应用领域的顶级学术期刊,旨在促进对地球表面特征的理解和监测。该期刊为中科院1区TOP期刊,五年平均影响因子7.5。
摘要
本文针对从3D点云中进行室内空间分割的挑战进行了研究,这对于理解室内布局、重建3D结构以及开发室内导航地图至关重要。当前方法往往无法完整捕捉复杂室内空间所需的局部和全局3D特征,尤其是在多环嵌套结构等复杂情况下,且在不同场景之间的泛化能力有待提高。为此,本文提出了一种高效的室内空间分割方法,通过利用点云在2D中的分布特性和3D中的局部与全局特征,实现了复杂室内环境中垂直结构信息的可靠提取。为了解决由于尺度变化引起的小空间下的过度分割问题,引入了一种由局部特征引导的空间分区锚点自适应提取方法。在实例级空间分割过程中,采用了分层轮廓树结构,精确地划分复杂的室内空间,有效处理了圆形和复合结构的室内场景。
主要内容
本文框架包含三个关键步骤:室内垂直结构提取、空间分区锚点识别和空间划分。首先,粗略提取来自无结构3D点云的水平和垂直结构点,由于室内家具等元素的干扰,垂直结构中常常包含噪声。为了解决这一问题,框架在2D和3D空间中分别应用了滤波方法。在2D空间中,点云被投影到XOY平面,并根据密度和最大高度进行过滤;在3D空间中,使用法向量和曲率特征进行区域生长进行平面分割,以精细化垂直平面点云。接着,为进行空间分区锚点识别,将去噪后的点云投影到2D空间进行形态学分析,进行初步的轮廓检测,进而去除小轮廓来减少噪声。然后,通过距离计算来提取基于局部特征的空间分区锚点,作为后续空间分割过程的种子点。

最后,框架将轮廓组织成层次树结构,并应用分水岭算法进行空间划分。轮廓根据其层次关系进行检测和排列,叶子节点和根节点作为空间锚点,中间节点作为非空间锚点。应用分水岭算法后,最终得到划分好的室内空间,其中与空间锚点相关的区域被着色填充,非空间锚点的区域则填充为白色。

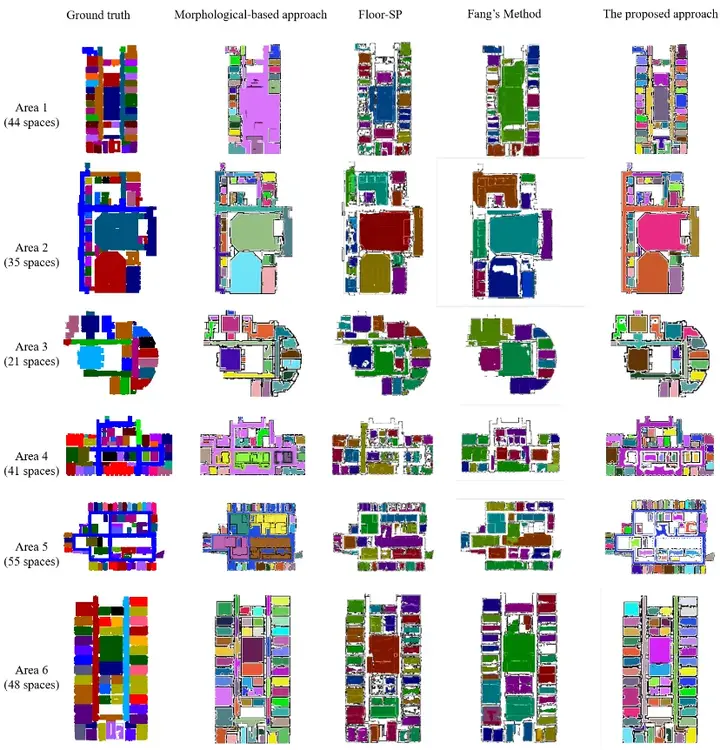
本文在Beike数据集的96个RGB-D扫描数据和S3DIS的6个大规模室内数据集中进行方法验证且与现有先进算法进行对比分析,试验涵盖了不同复杂度、大小和结构的室内场景。结果表明,本文所提出方法在准确性、鲁棒性和泛化能力方面显著优于现有方法,为室内空间建模和机器人导航提供了坚实的基础。
主要贡献
✦ 提出一种基于多维特征约束的室内垂直结构提取算法,充分融合二维空间中点云的密度和高程分布信息。实现室内垂直结构的精确提取。
✦ 提出一种基于局部特征的空间分区锚点自适应提取方法,能够有效解决小空间因尺度变化导致的过度分割问题。
✦ 设计一种分层分水岭方法实现复合环形和嵌套结构的空间划分,通过将轮廓组织成树状结构,在不同层次上实现对室内场景的精细分割。
论文链接
https://www.sciencedirect.com/science/article/pii/S1569843224006216
✦ 光明实验室智慧城市团队
光明实验室智慧城市团队由中国工程院院士郭仁忠领衔,致力于从事:
(1)室内外定位及三维重建
(2)XR 3D空间数字人
(3)城市交通流预测
(4)城市大模型与知识图谱
等方面的工作。长期招聘博士后、全职序列(研究员、副研究员)与研究型实习生。
欢迎联系与交流:liyou@gml.ac.cn。
END
素材来源 丨光明实验室智慧城市团队
编 辑 丨 李沛昱
审 核 丨 郭 锴



 发布时间:2024-12-29
发布时间:2024-12-29 作者:光明实验室
作者:光明实验室 浏览:4364次
浏览:4364次