



空间智能×球形机器人:光明实验室打造新一代"城市生命线"守护者
![]() 发布时间:2025-04-02
发布时间:2025-04-02![]() 作者:光明实验室
作者:光明实验室![]() 浏览:2937次
浏览:2937次

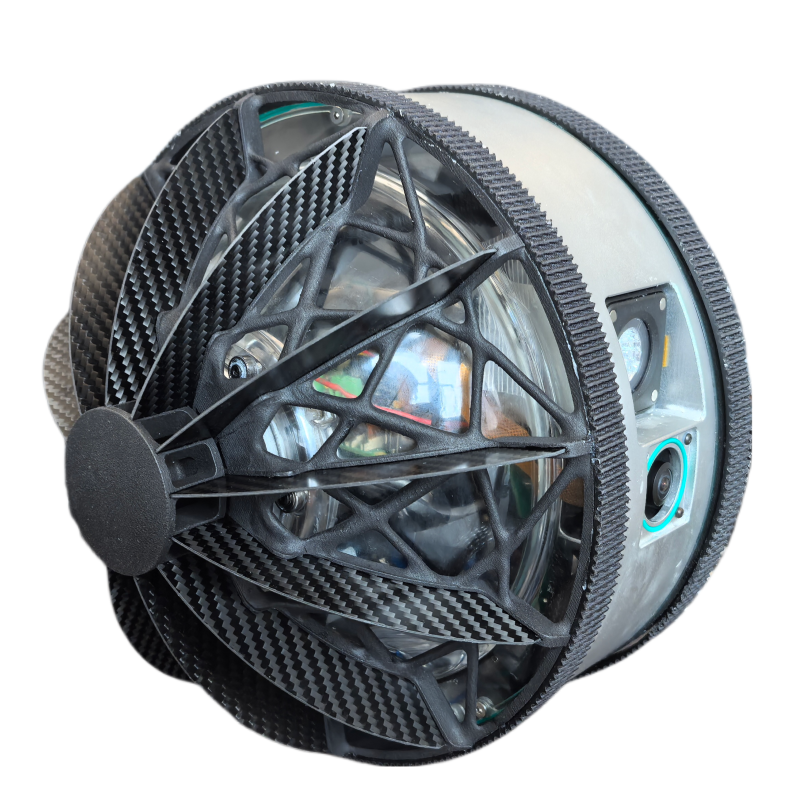
城市地下管网作为现代都市运行的"生命线",长期面临人工巡检环境恶劣、效率低下、安全风险高等突出难题。针对这一行业痛点,光明实验室灵动纪元团队近日成功突破技术瓶颈,研制出新一代具身智能球形机器人1.0版本。

展现具身智能“硬实力”
该机器人充分发挥了灵动纪元团队机器人硬件实力,可实现地面滚动与水面悬浮移动的丝滑切换,具备多域环境适应性和多模态运动能力,是空间感知与具身智能融合的创新载体,可精准适配“生命线”场景。
1、多模态灵活运动:该机器人采用隔离式动力输出方案(全舱体绝对静密封,磁耦合驱动),配备了球形波轮执行机构,能够兼顾陆地和水面双模态运动的有效输出,并实现在地面或水面0转弯半径运动的灵活运动表现。
2、多场景主动适配:该机器人具备主动倾角姿态调节系统和刚柔耦合的拓扑结构,能够在非结构环境中应对意外冲击,在复杂地形、极端环境及跨介质场景中提升自主化巡检效率。

拓展具身智能“软实力”
在独具特色优势的机器人本体基础上,团队将结合多模态数据融合和大模型、力学控制等关键技术,深化“大小脑协同”的自主化与智能化能力,实现本体运动控制与环境交互的深度耦合,推动机器人从预设任务执行向自主认知决策跃迁,持续提升机器人自主化导航与智能化作业能力。

全方位拓展“守护”边界
该机器人将深度耦合场景需求,实现地下管网、城市水域、复杂地形等隐蔽空间的全自主巡检,不断拓展“守护”边界,为智慧城市基础设施运维提供革命性解决方案:
1、地下管网数字孪生:城市地下管网健康检测与构建动态病害数据库;
2、水域生态监测:集成微型质谱仪实现污染源快速溯源;
3、应急搜救:开发模块化救援套件支撑防灾减灾。
该成果由李清泉院士指导,核心成员包括宋纪元、屠尧、刘贺兵、段一辉、杨双戈。
“空间智能”的拓展与深化
该机器人不仅通过创新硬件本体设计,有效拓展了空间感知维度,更实现了“感知-建模-决策-执行”全栈技术闭环突破,为空间智能技术应用提供了具身智能新载体;并将依托国产算力底座,持续优化“空间感知-具身交互-群体智能”技术链,重点攻关基于地理信息系统(GIS)的多机器人协同测绘、融合物理规律的管网健康度预测大模型和国产算力轻量化端侧部署。
空间智能技术作为AI从虚拟助手迈向实体生产力的“关键拼图”,不仅是让机器“看见”三维环境,更将赋予其“认知-推理-行动”的能力,通过构建多模态空间认知与物理世界交互闭环,将重构机器人对物理世界的感知、决策与交互范式,形成“环境-身体-智能”三位一体的进化路径,驱动机器人从单一功能设备向具身智能体跃迁。
该机器人作为空间智能技术赋能具身智能机器人应用的新一代具身载体,将通过物理形态创新与空间智能技术赋能的双向驱动,重塑具身智能系统的环境交互边界,为工业检测、资源勘探、灾害救援等领域提供灵活的智能化与自主化解决方案,推动空间智能技术在隐蔽空间探测、城市数字孪生等战略领域的产业化落地,助力我国在具身智能装备领域的技术领跑。
光明实验室在李清泉院士领衔下,致力于打造具备自身特色优势的空间智能创新与应用体系,充分发挥其在空间智能领域的深厚技术积累与数据资产壁垒优势,以及光明实验室跨学科技术交叉融合的有组织科研机制优势,着力构建“全域泛在感知-多模态数据解译-多模态大模型-多场景应用”的闭环架构,以应用为牵引,开展关键技术攻关,重构物理与数字世界的交互范式,赋能智慧城市、低空经济、无人驾驶、具身智能机器人等战略新兴产业变革,并基于光明实验室国产算力基座优势,逐步推动空间智能领域全栈国产化。
END
素 材 丨 灵动纪元团队
编 辑 丨 李沛昱
审 核 丨 宋纪元 李沛昱 郭 锴



 发布时间:2025-04-02
发布时间:2025-04-02 作者:光明实验室
作者:光明实验室 浏览:2937次
浏览:2937次